
- Introduction To RC Transmitters
- Transmitter Binding and Model Memory
- -> Dual Rates and Exponential
- Delta Wing Mixing
Last Updated on October 25, 2019.
Original Date posted: March 10, 2010
Dual Rates
This was actually the first transmitter video/article I wanted to create, but I figured we should walk before we run, as even though it’s one of the more exciting transmitter topics to cover, without knowing about creating model memory slots or binding, you can’t effectively work with dual rates and expo.
So, let’s break out the definitions. Let’s define Dual Rate and Exponential as the two primary methods for regulating servo arm throw during flight for purposes of altering the aerodynamic handling of your aircraft. A bit of a mouthful, so let’s ‘break it down’ (hopefully a little better than Michael Keaton in Night Shift). With any of your airplanes or helicopters, from big to small, servos are used for such things as changing the angle of your swash-plate, which in turn alters the the angle your helicopter blades spin at, causing it to change direction, as well as moving your ailerons, rudder, and elevators on your plane to change angle, causing your airplane to change direction.
The movements of your transmitter sticks are relayed to your receiver which in turn controls your servos. In general, moving a stick on your transmitter all the way from one end to another, be it left/right or up/down, also moves your servo from one end point of rotation all the way to it’s opposite end point of rotation. The movement of your servo arm from one end to the other is often called servo throw or servo travel.
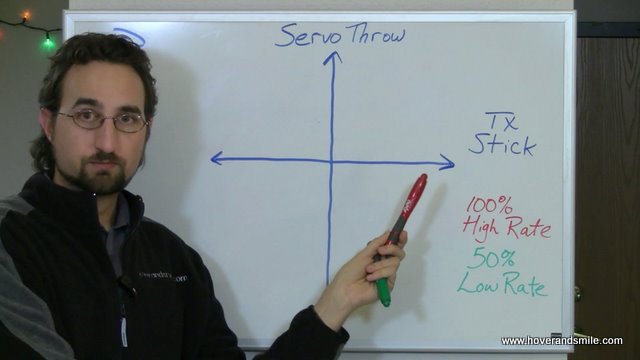
Looking at this graph here, we have a simple linear graph of transmitter stick movement and servo arm travel. The actual distance of the servo throw doesn’t matter, it’s your baseline, and that’s what counts. Moving the stick from one point to another moves the servo accordingly, from one end point to another. We’ll use this graph as a reference for the remainder of the article to explain how dual rates and exponential change this graph.
Now, with that said, let’s explain dual rates. They’re called dual rates because transmitters often have ‘hi/lo’ switches to move from one set of rates to another set of rates. Dual rate means you can switch between two settings of servo travel with just a simple flip of a transmitter switch. If your high-rate is set at 100%, that means your servos move 100% of the total allowed arm travel or throw. If your low-rate is at 50%, then when you flip the transmitter switch, the servos now only move 50% of the total allowed throw. So looking at the graph, this red line represents high-rate. We would represent low rate by reducing the angle of the line, which means even though it extends all the way across the line of transmitter stick movement, the amount of servo travel decreases.
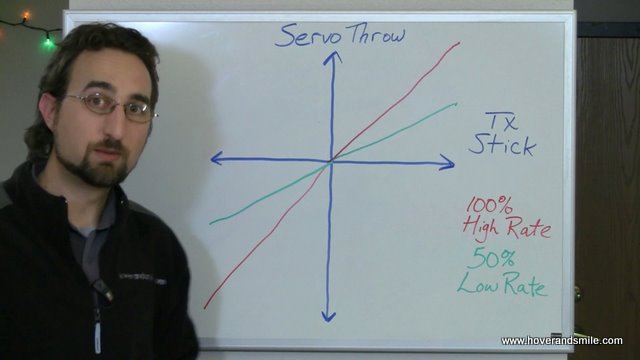
Think of your car’s steering wheel. If you could only turn the wheel half as far as you could, you wouldn’t be able to make turns as tightly as you could if you turned your wheel all the way. Same idea applies here.
That’s the general idea. There is no magic dual rate amount from one plane to the next because it ALL comes down to how YOU fly the plane. However, it’s often recommended that beginners use low rates, and if you’re not sure what rates you need, start conservatively. Start off at 65-75% and change by 10% intervals until you’re comfortable. Whittle down accordingly.
Exponential
Exponential and Dual Rates work well together, but without confusing you too much let’s look at Exponential alone with a regular 100% rate. Exponential is the term used for when you apply an exponential curve to our servo throw/transmitter stick graph. What does this give you, in essence? Stick numbing.
Numbing the stick around the center point is a great way to learn helicopter hovering, as you won’t be so apt to fling the helicopter from one direction to another as you learn not only to react to the helicopter’s movements, but predict how the helicopter is going to move next.
So let’s take a look at what exponential looks like on a graph alone:
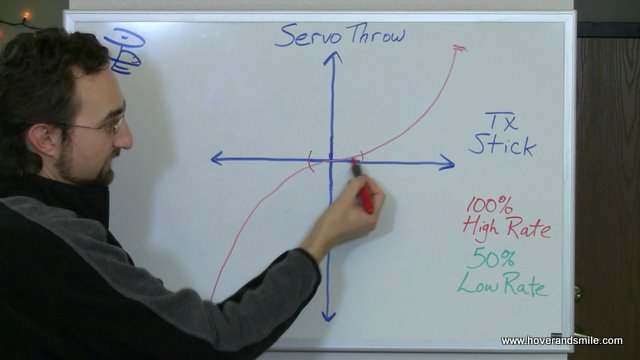
Follow along the lines. Notice how if you transmitter stick is just barely moved away from center, there is less servo throw on this graph as compared to the far ends. This is what gives you that ‘numb’ feel around the center point, but at the end points it’s just like exponential was never even set – where the curve ‘catches up’ to the end points.
Go back to the steering example we used before. This time, think of loose vs tight steering. Loose steering is similar to having exponential on your steering wheel, you need to really turn it more to start moving, while the opposite is true of tight steering. That’s why it all comes down to a matter of feel. For experienced pilots, too much exponential may make a craft feel ‘sluggish’, whereas a beginner pilot may have their hands full.
Look now at the combination of exponential and dual rates. Building upon all the ideas discussed here, it’s not a huge step, but a fundamental one nonetheless:
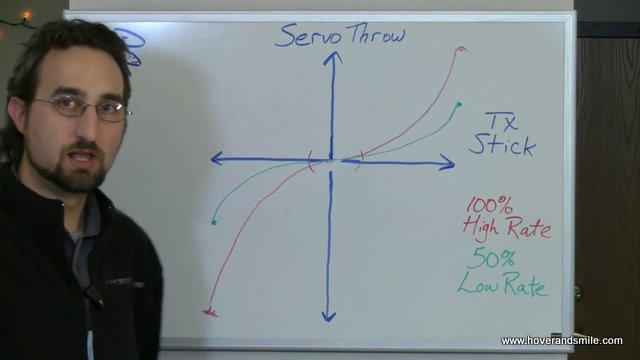
All the dual rate changes is the end point travel, the exponential curve stays the same.
The easiest way to feel this before you fly is to just change your craft’s dual rates and expo on your workbench and play with the controls, you can easily see how different the ailerons and elevators work by just watching how far/smooth they move when in one rate or another. A little harder to see with a helicopter, so just be careful with the hovering.
Why?
Why? What does switching rates give us? There are numerous reasons to change the amount of servo throw, two reasons to consider are training and speed. An experienced pilot may fly a plane at a higher rate of servo throw, as they’re comfortable with the plane and how it flies. Handing that plane to an inexperienced pilot with the same rates could be a disaster, because when we first learn to fly we’re awfully jerky with the sticks… at least most of us are. This makes it awfully difficult to get control because beginners feel the need to correct themselves by moving sticks dramatically from end to end. So, a beginner pilot using the low-rate setting will enjoy a more docile craft for the sake of learning and getting a feel of how the craft flies.
Speed is another reason. For example, the faster an airplane moves, your control surfaces have a more dramatic effect on your flight. Take a plane flying slowly with elevators moving at just 20 degrees from center. Now, double or triple the speed of the plane, but keep the 20 degrees the same. The change is dramatic due to the amount of air now moving over your control surfaces. For this case, then a pilot may have a lower rate setting while they’re really pushing the speed to the limit, so they can still retain control, and use the higher rate (i.e. more control surface deflection because the servo arms move farther) when flying more slowly.
How?
Well, here we come down to the parts that are best represented by video. We have four movies ready for you here, two on the theory of dual rates and exponential, followed by how to set dual rate and expo with both the Spektrum DX6i and Spektrum DX7 transmitters.
Enjoy!
Note: HoverAndSmile.com is no more. The content has been migrated into krystof.io.